General Specs |
|
| Spec | Value |
| Supply Voltage | 8-16VDC (pinging will still occur at lower voltages but the unit will not function predictably) |
| Min Range | ~15cm (0.5 feet) (confirmed) |
| Max Range | ~5.8 meters (19 feet) (confirmed) |
| Beam Angle | 15 degrees nominal, cone shaped |
| Speed of Sound | 340.29 meters/second (at sea level, 25C, 101.325kPa) |
SonaMini-S Model Sonar Sensor
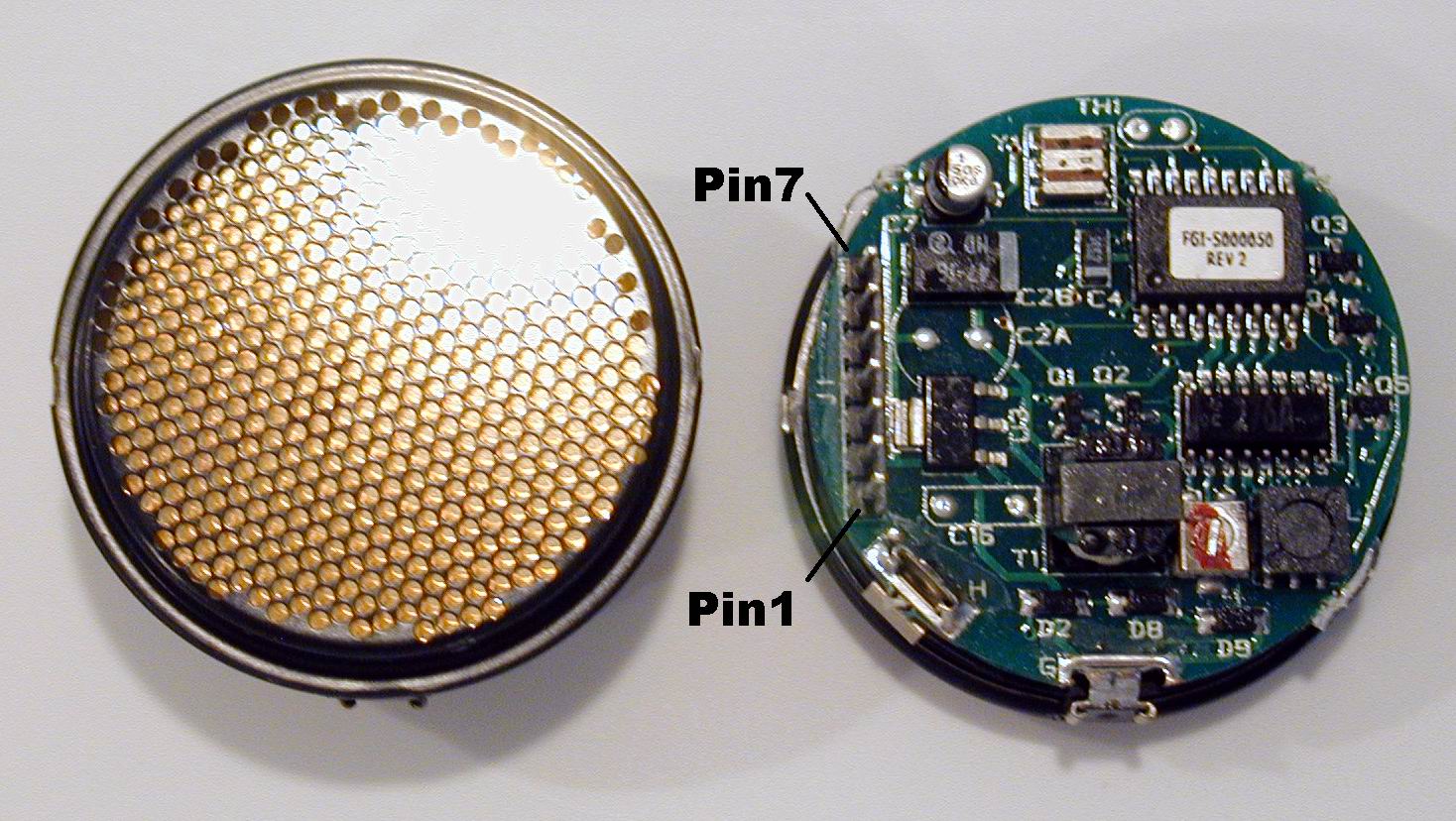
| Pin # | Description |
| 1 | 8-16VDC Power Input (note: sonar will start pinging at ~5VDC, but will not really work until 7-8V power input is reached) |
| 2 | Ground |
| 3 | External Trigger Input (a brief 5V high pulse here will trigger a sonar ping) |
| 4 | External Trigger Enable (digital input: High=self-trigger 5Hz, Low=ext. trigger, Pin3) |
| 5 | Sonar TOF Out (This pin goes high at the instant that a ping is transmitted, and then goes low when the echo of the ping is received. In other words, the pulse width of this electrical signal is equal to the time-of-flight, or TOF, of the sonar sound pulse.) |
| 6 | Range Trigger 1 (NPN open-collector output that goes low when the sonar detects an object closer than a preprogrammed distance. The distance at which this output triggers is unknown for our sensors.) |
| 7 | Range Trigger 2 (NPN open-collector output that goes low when the sonar detects an object closer than a preprogrammed distance. The distance at which this output triggers is unknown for our sensors.) |