RF Systems:
|
- 1x to 16x RF outputs
- 1-400MHz frequency range
- 1GHz phase-locked Direct Digital Synthesis
- Continuous, pulse, or waveform-modulated output
- High speed amplitude/phase modulation (up to 250 Msps)
- Front-panel status display
- TTL-triggered pulse playback
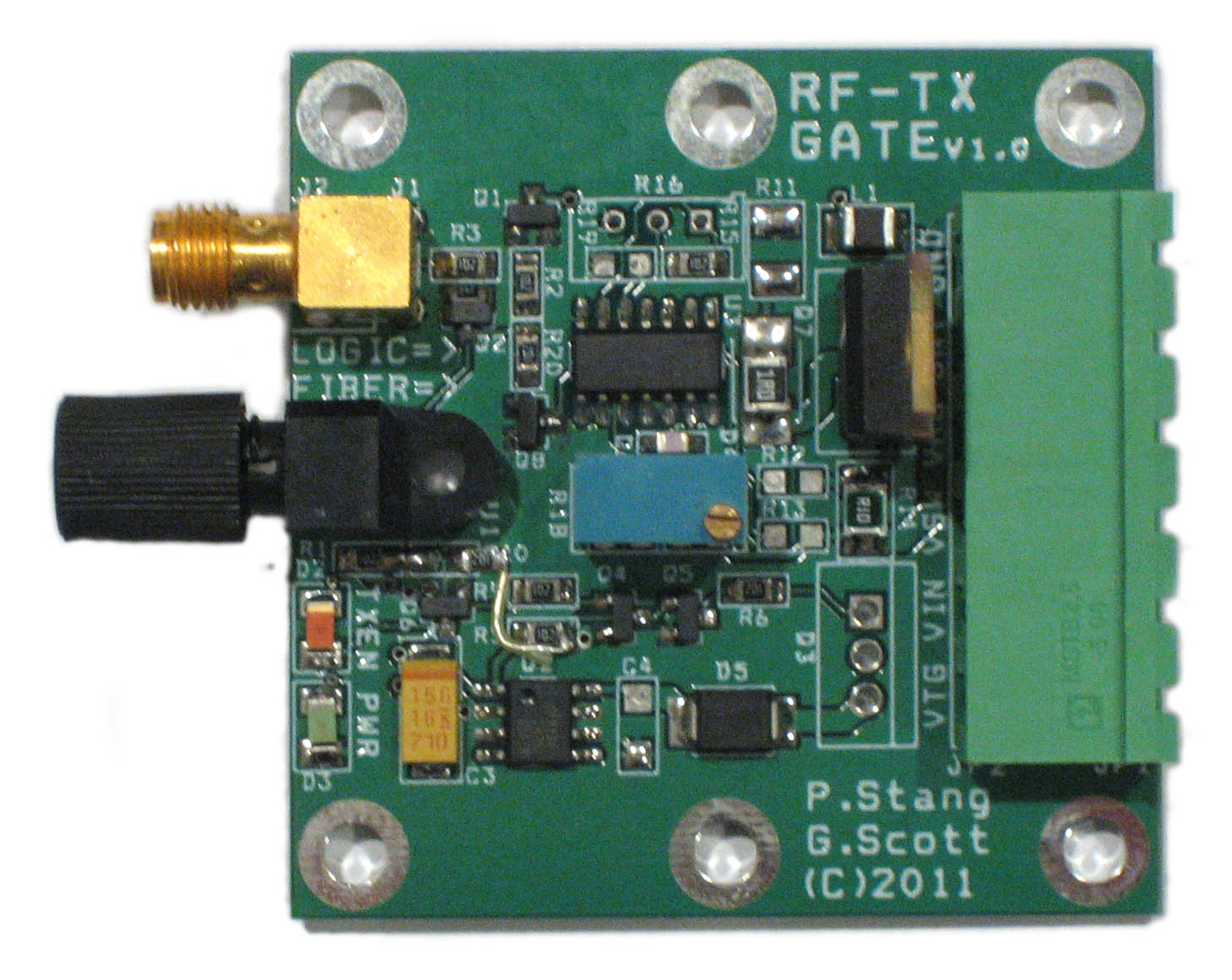
- RF Amplifier gating outputs
- 10MHz reference input/output
- Commanding via Ethernet, USB, Serial, or CAN
- Rack-mount enclosure (3U for 1-8 channels)
|
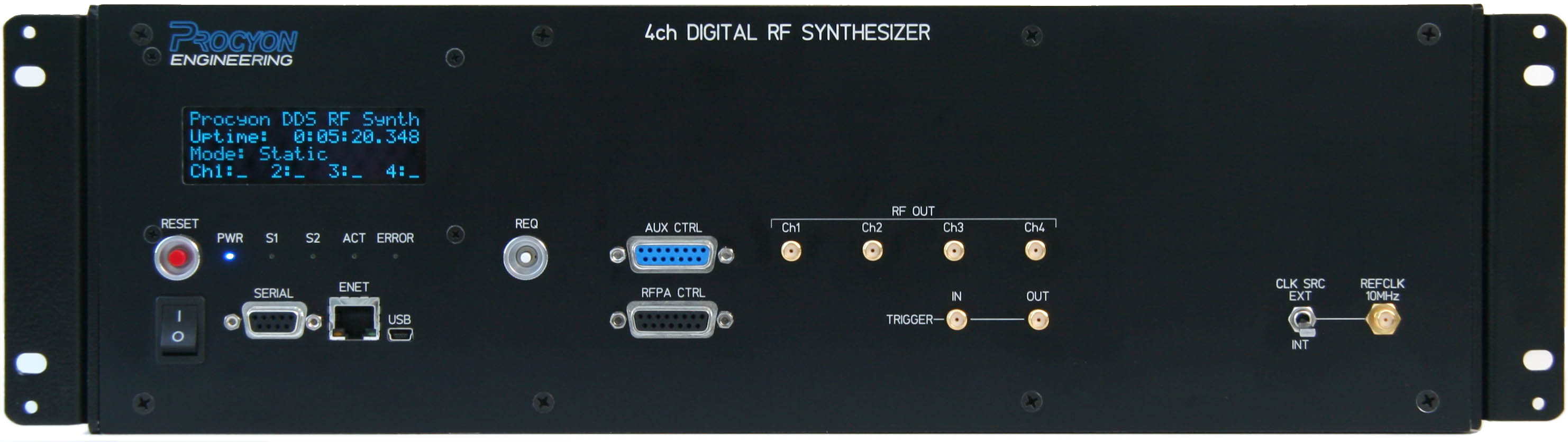
(4ch model shown) |
|
- 1x to 8x channels
- Broadband linear RF amplifier from 5-350MHz
- 50W - 1kW output powers per channel
- Real-Time Vfwd / Vrev output monitoring
- Front-panel status display with power view
- Intelligent Thermal and VSWR Protection
- Commanding via Ethernet, USB, Serial, or CAN
- Rack-mount enclosure (4U)
|
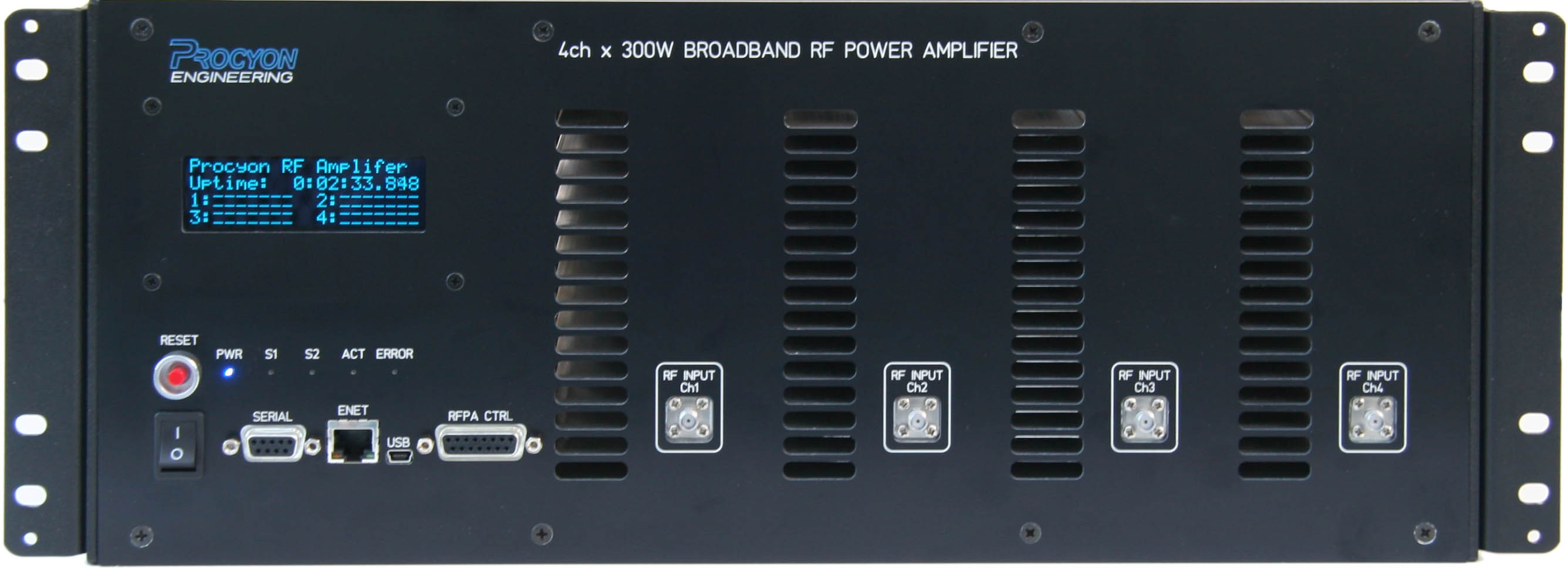
(4ch 300W 5-250MHz model shown) |
|
- Scalable design adapts to application needs
- 1x to 32x agile RF Tx/Rx channels (0-100MHz)
- 4x to 32x digital gradient channels
- Real-Time MR Pulse Sequence Execution Engine
- Front-panel status display
- Commanding via USB or Serial
- Rack-mountable enclosure (3U for 1-8 channels)
|
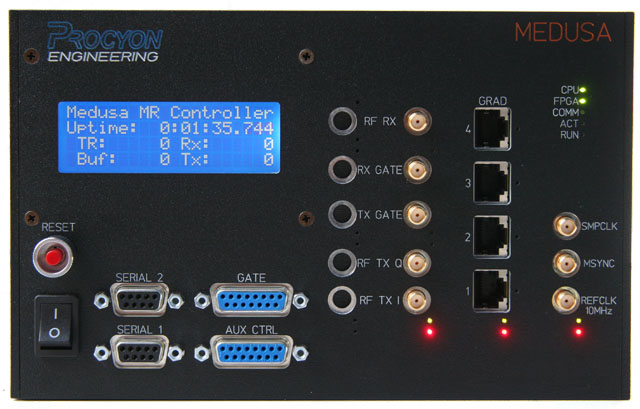
(1-2ch half-rack model shown) |
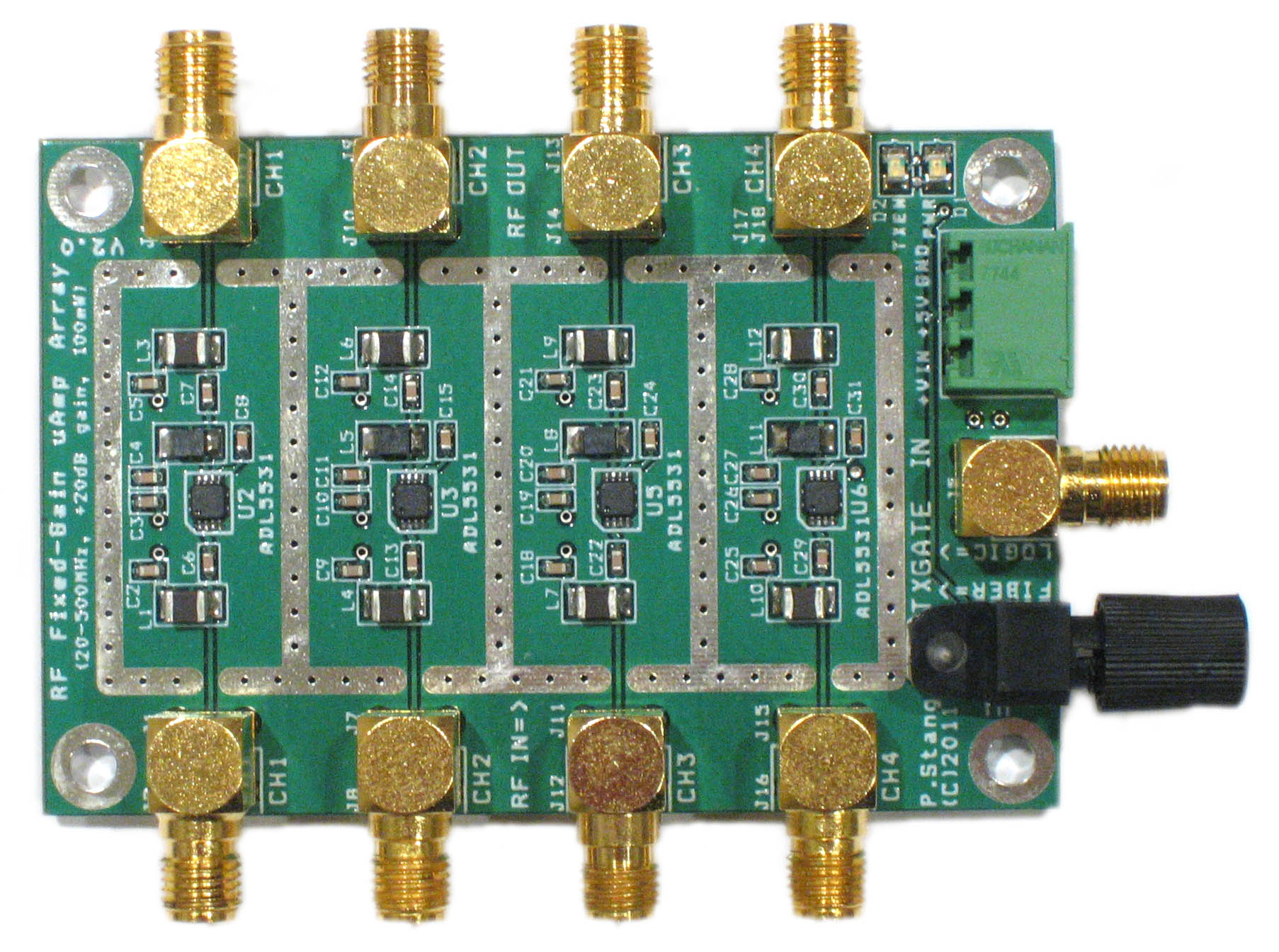
RF Modules and Subsystems:
|
- 1MHz to 1GHz
- 1uW to 1kW
- MRI and NMR applications
- RF test equipment / ATE
|
|
Interface and Test Tools:
|
- up to 50Mbps user modulation
- up to 10Mbps programmable data modulation
- BNC user modulation input/output
- USB data / charging
- Internal LiIon battery (24hr std, 40hr extended)
|

|
|
- 3x CAN buses
- 1x ISO bus
- Ethernet + USB host interfaces
- SD-card datalogging option
- 10-1000kbps operation
- High packet throughput and deep internal buffering
- Compatibility mode for CanHackerV2 software
|
|
|
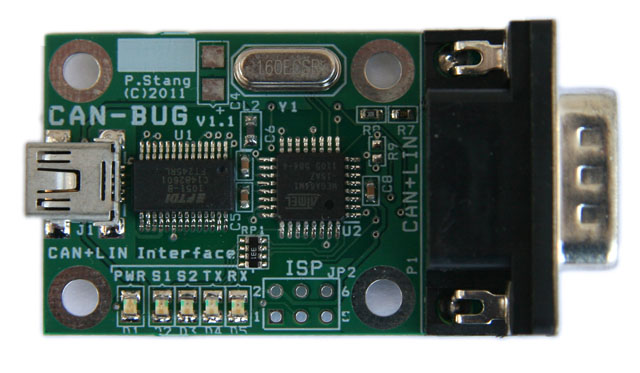
- 1x CAN bus
- 1x ISO bus
- USB host interface
- Miniature size
- 10-1000kbps operation
- High packet throughput and deep internal buffering
- Compatibility mode for CanHackerV2 software
|
|
Motor Control:
|
- 100Mb Ethernet Real-Time commanding
- 6-motor simultaneous PID control
- FPGA PWM and Encoder counting
- Closed-loop current control and feedback
- 50V 20A (40A peak) outputs
|

|
|
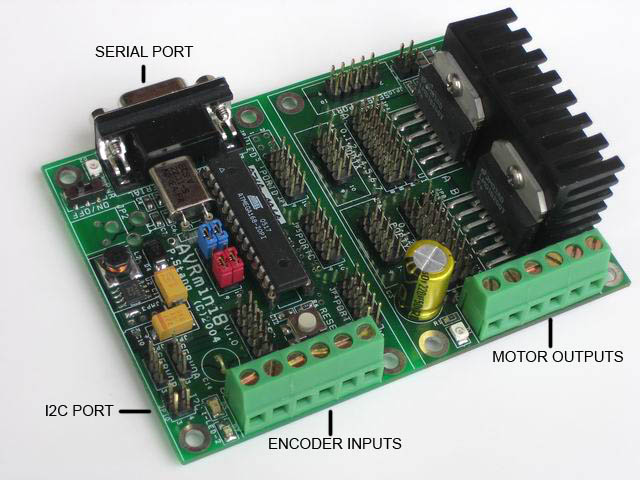
- Atmel AVR-based design
- Serial or I2C commanding
- 2-motor simultaneous PID control
- Trapezoidal motion execution
- 50V 3A (6A peak) outputs
|
|
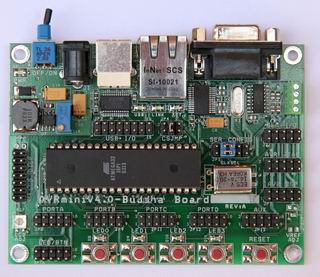
Embedded MCU Development Boards and Tools:
|
- Boards for Atmel AVR processors
- Standard 10-pin GPIO breakouts
- Serial, I2C, SPI, CAN, and Ethernet interfaces
- Built-in power supplies
- Various form factors
|
|
|
- Development boards for various ARM microcontrollers
- Standard 10-pin GPIO breakouts
- Serial, I2C, SPI, CAN, and Ethernet interfaces
- Built-in power supplies
- Various form factors
|

|
|
